ドローン自動衝突回避システムの実証実験を行いました
~自動飛行中のドローンが自動で衝突回避できるかを検証~

令和4年6月3日
東日本高速道路株式会社
NEXCO東日本(東京都千代田区)と、株式会社FaroStar(東京都新宿区)は、福島県南相馬市のセデッテかしまの東側に位置する森林において、南相馬市の協力の下、ドローンの自動衝突回避システムの実証実験を行いました。この実証実験は、将来の無人航空機やドローンの活用を視野に、これらの機体の安全な飛行の確保を目的としています。
なお、本実証実験は、令和3年9月より募集を開始しておりましたアクセラレータープログラム『ドラぷらイノベーションラボ』において採択された企業との実証実験となります。


実証実験概要
- 実験日
5月18日、19日 - 実験場所
セデッテかしま東側森林(南相馬鹿島SA付近) - 実施目的
将来の無人航空機やドローンの活用を視野に、これらの機体の安全な飛行の確保を目的としています。 - 実施内容・結果
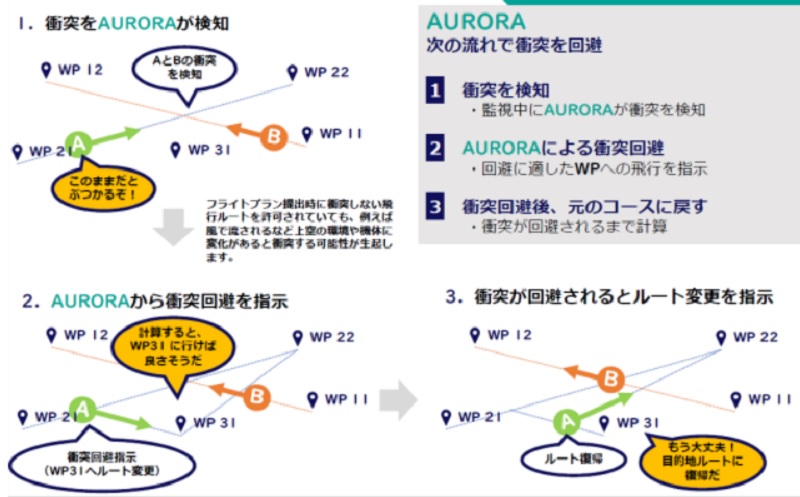
ACSL製(国産)の実機ドローンに、FaroStarが開発した衝突防止自動管制技術(※1)AURORA(オーロラ)を搭載。自動飛行中の実機ドローンに、別のドローンを近づけ、自動で衝突を回避できるかを検証したものです。4回の衝突実験(高度30m~50m、延長700mの飛行経路)すべてにおいて衝突回避を確認しました。


(※1)衝突防止自動管制技術について
衝突防止自動管制技術は、航空機やドローンの飛行情報を取得し、そのデータを基に飛行体同士が衝突する可能性を検知すると、「空飛ぶクルマ」を模擬したドローンに回避可能なWP(ウェイポイント)を指定して自動回避させ、衝突を回避できたと判定すると次のWPに誘導する技術です
使用機体について
本実証試験に使用したACSL製の国産の産業用ドローンは、物流、インフラ点検、災害等、様々な分野ですでに採用されており、特に、全国的にも事例の少ない補助者無し目視外飛行(Level3)について、多くの実績を積んでいます。国産ドローンACSL-PF2にFaroStarの衝突防止自動管制技術AURORAを搭載することで、ドローン飛行の安全性を高めることが可能となります。


ドラぷらイノベーションラボとは
当社のオープンイノベーションを一層促進し、新たな技術やサービスアイデアなどを持つ会社等と、ラボを通じて技術・ビジネスモデルを検証しながら、次世代の高速道路サービスの実現や、地域の活性化、社会課題を解決するような事業を創出することを目的としています。
当社は、地域と地域をつなぎ、お客様の「安全・安心・快適・便利」を支えてきました。これらに加えて、さらに、ヒト・モノ・コトの移動に「新しい価値」を提供し、サステナビリティのある運営を目指します。
当社は、新たな価値創造に向け、引き続き取り組みを強化してまいります。
参考
<株式会社FaroStar>
東京都新宿区四谷三栄町1‐2
四谷Xeビル3階
NEXCO東日本グループでは、2021~2025年までの期間を「SDGsの達成に貢献し、新たな未来社会に向け変革していく期間」と位置づけ、様々な取り組みを行っています。
今回の「ドラぷらイノベーションラボ」の取り組みについては、パートナー企業との新たなサービス・プロダクトの共創・社会実装につながる事業活動として、SDGs目標の8番、17番に貢献するものと考えています。

PDFファイルをご覧いただくには、AdobeSystems社のプラグインソフト「Acrobat Reader(日本語版)」が必要です。お持ちでない方は、こちらからダウンロード(無料)してご利用ください。
関連サイト・コンテンツ
料金・ルート検索、サービスエリア・パーキングエリアの情報をお探しの方はこちら。
リアルタイムの渋滞・規制情報をお探しの方はこちら。
災害時の通行止めなどの道路情報をお探しの方はこちら。