我们进行了无人机自动防撞系统的演示实验
〜验证无人机在自动飞行中是否可以自动避免碰撞〜

令和 4 年 6 月 3 日
东日本高速公路股份有限公司
NEXCO东日本(东京都千代田区)和FaroStar Co., Ltd.(东京都新宿区)将避免无人机在位于福岛县南相马市Sedette Kashima东侧的森林中发生自动碰撞,与南相马市的合作 我们进行了系统的示范实验。本次演示实验旨在确保这些飞机的安全飞行,以期在未来使用无人机和无人机。
此外,本次示范实验将是在令和9月3日招募的加速器项目“ DraPla创新实验室”中采用的一家公司的示范实验。

![碰撞实验上方的照片 (后面是 [E6] 与常磐高速公路相邻的赛德岛) 的照片](/pressroom/cms_assets/pressroom/2022/06/03a/03.jpg)
示范实验大纲
- 实验日
5 月 18 日至 19 日 - 实验现场
Sedette Kashima East Forest(南相马鹿岛SA附近) - 实施目的
为了在未来使用无人机和无人机,我们的目标是确保这些飞机的安全飞行。 - 实施细节/结果
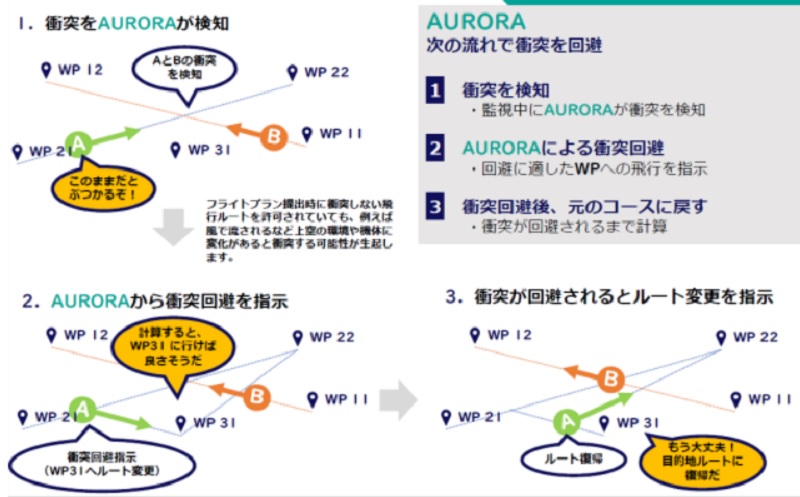
ACSL(国内)的实际无人机搭载了由FaroStar(*1)开发的自动防撞控制技术AURORA。这是对自动飞行中是否可以让另一架无人机靠近实际无人机并自动避免碰撞的验证。在所有四次碰撞测试(高度 30m-50m,延伸 700m 飞行路径)中都确认了防撞。


(* 1) 防撞自动控制技术
防撞自动控制技术获取飞机和无人机的飞行信息,当根据数据检测到飞行物体之间可能发生碰撞时,可以通过无人机模拟“飞行汽车”WP(方式)进行避让。一种通过指定(点)自动回避并在判断可以避免碰撞时引导到下一个WP的技术。
关于使用机体
用于该演示测试的国产ACSL工业无人机已经在物流,基础设施检查,灾害等各个领域被采用,特别是在全国范围内没有少量案例的助手我们在视觉外飞行 (3级) 方面取得了很多成就。通过在国产无人机ACSL-PF2上安装FaroStar的防撞自动控制技术AURORA,可以提高无人机飞行的安全性。


什么是DraPla创新实验室?
在进一步推动我们的开放式创新,通过与具有新技术和服务理念的公司的实验室验证技术和商业模式的同时,我们将实现下一代高速公路服务,振兴当地社区和社会问题。问题。
我们通过连接区域来支持客户的“安全、安心、舒适和便利”。除此之外,我们还将进一步为人、物、物的运动提供“新价值”,以实现可持续经营。
我们将继续加强努力,创造新的价值。
参考资料
<FaroStar Co.,Ltd。>
东京都新宿区四谷真荣町1-2
四谷Xe馆3楼
NEXCO東日本 Group将2021年至2025年期间定位为“有助于实现SDGs并转变为新的未来社会的时期”,并正在做出各种努力。
我们相信,这项“ DraPla创新实验室”计划将有助于实现可持续发展目标第 8 号和第 17 号目标,作为与合作伙伴公司共同创造和社会实施新服务和产品的商业活动......

要查看PDF文件,您需要Adobe系统插件软件“ Acrobat Reader(日语版)”。如果你没有在这里下载(免费)请使用它。
相关站点内容
如果您搜索了解票价、路线、服务区和停车区的信息,请点击这里。
如果您正在寻找实时交通拥堵/监管信息,请点击此处。
寻找灾害时禁止通行等道路信息的人请点击这里。